L’interface automatisable à remplacement rapide SWA40
Pour une utilisation avec des robots dans l’environnement des MMT, des machines de mesure optique, des tomodensitomètres, des appareils de mesure de surfaces et de contours ainsi que des systèmes de numérisation 3D.

Une optimisation de l’ensemble de la chaîne de processus
» Une intégration parfaite de la machine de mesure dans le processus global
» Une disposition ordonnée des échantillons sur la machine de mesure
» Un déplacement optimal dans la machine de mesure
» Un positionnement et une fixation répétitifs
» Un prélèvement / dépôt contrôlé en fonction du résultat de mesure
» Une intégration facile grâce à l’interface universelle à remplacement rapide
L’automatisation dans la métrologie avec l’interface SWA40
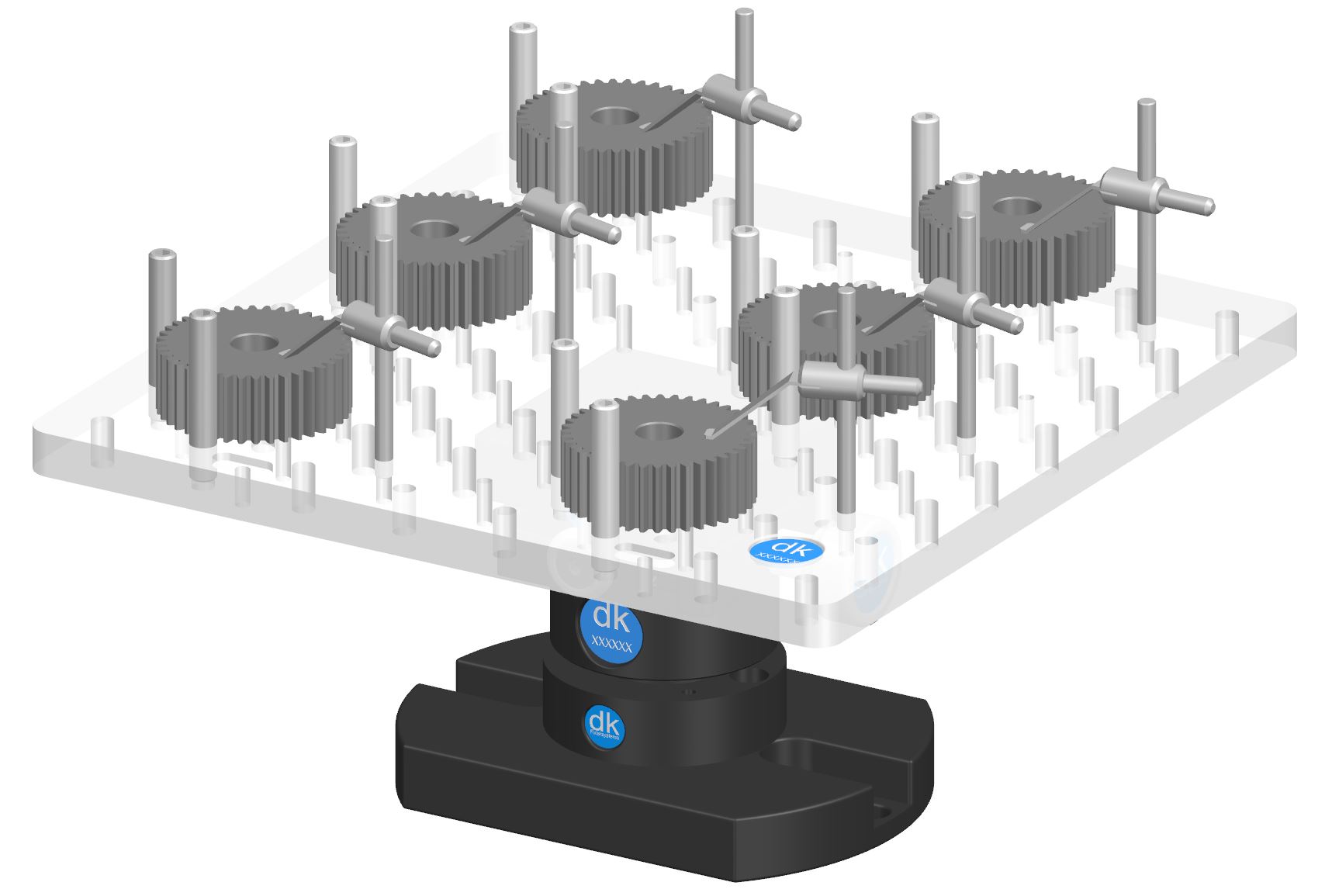
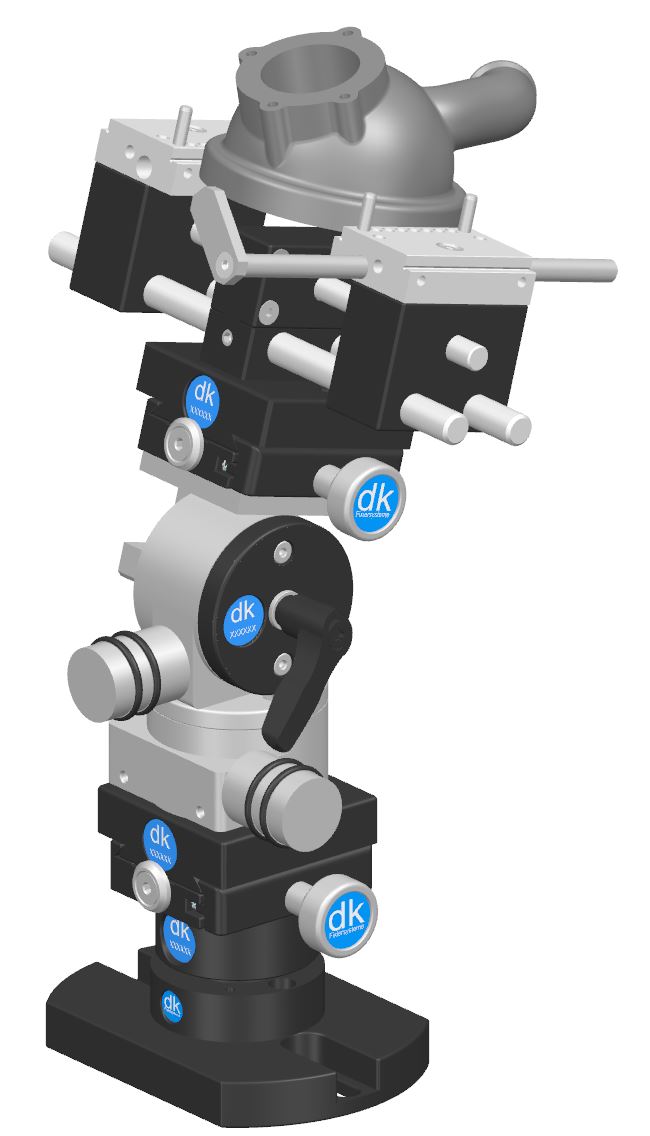
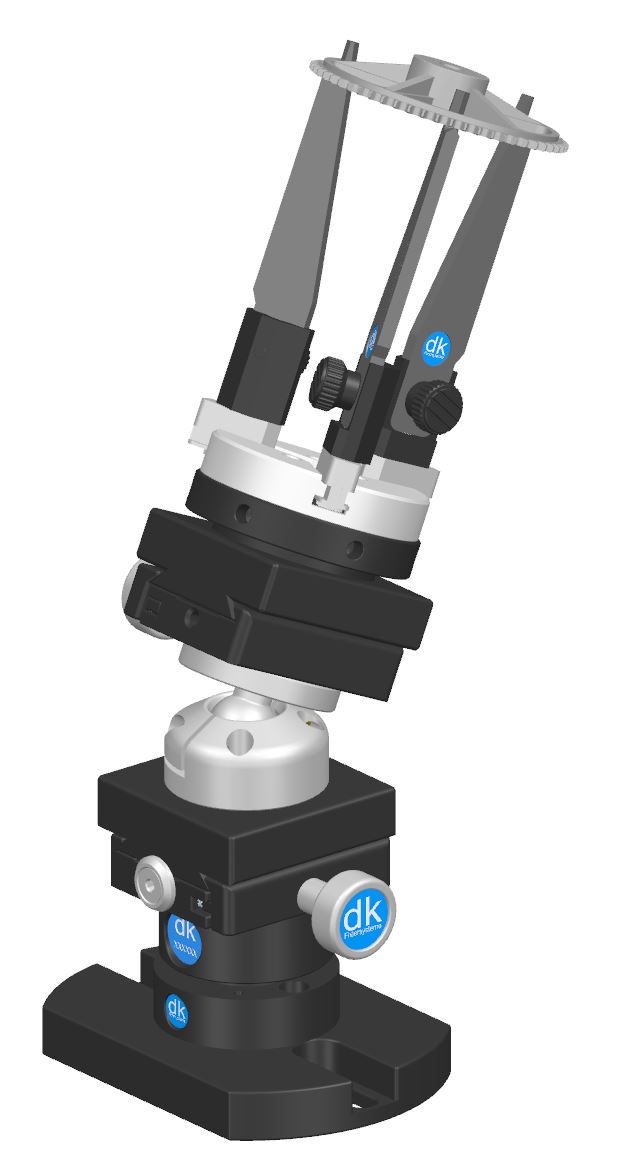
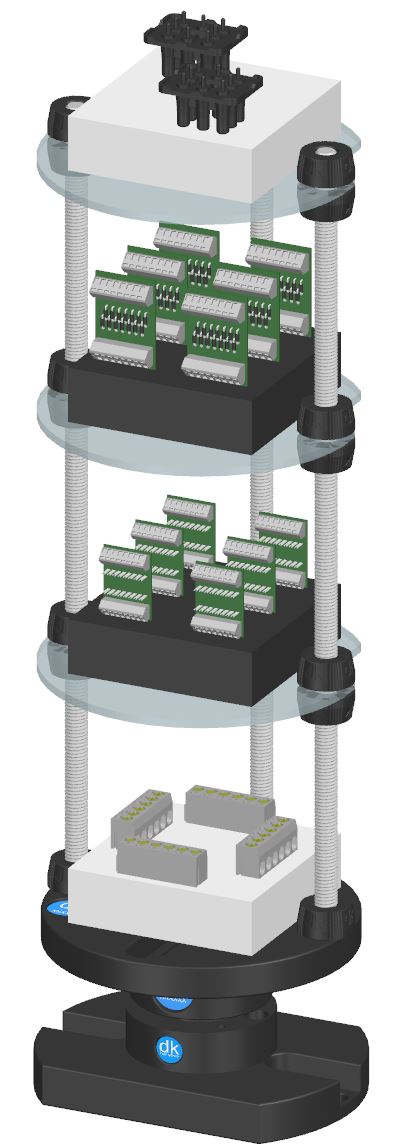
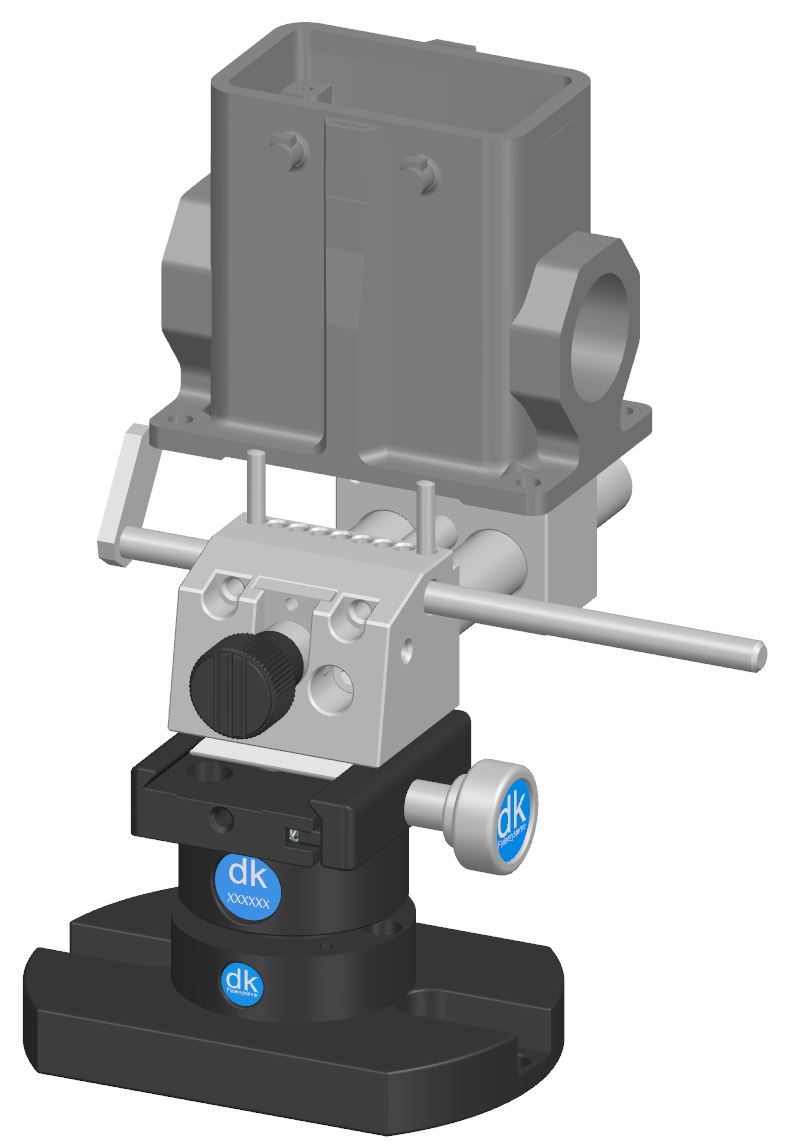
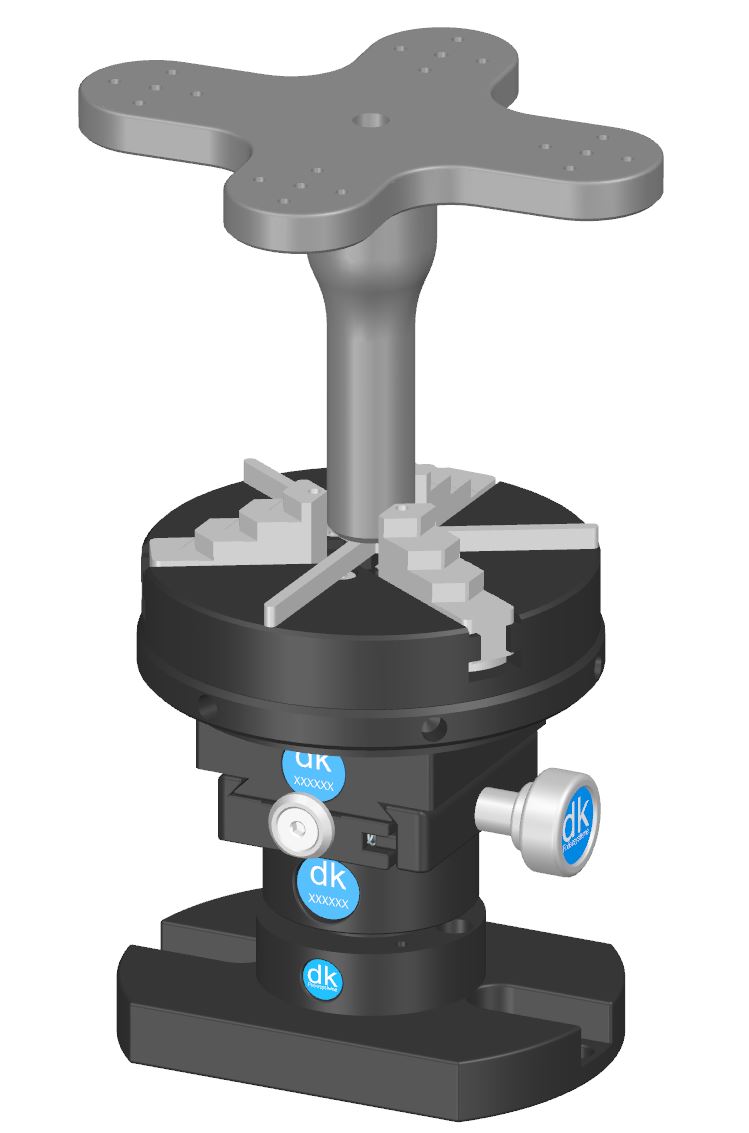
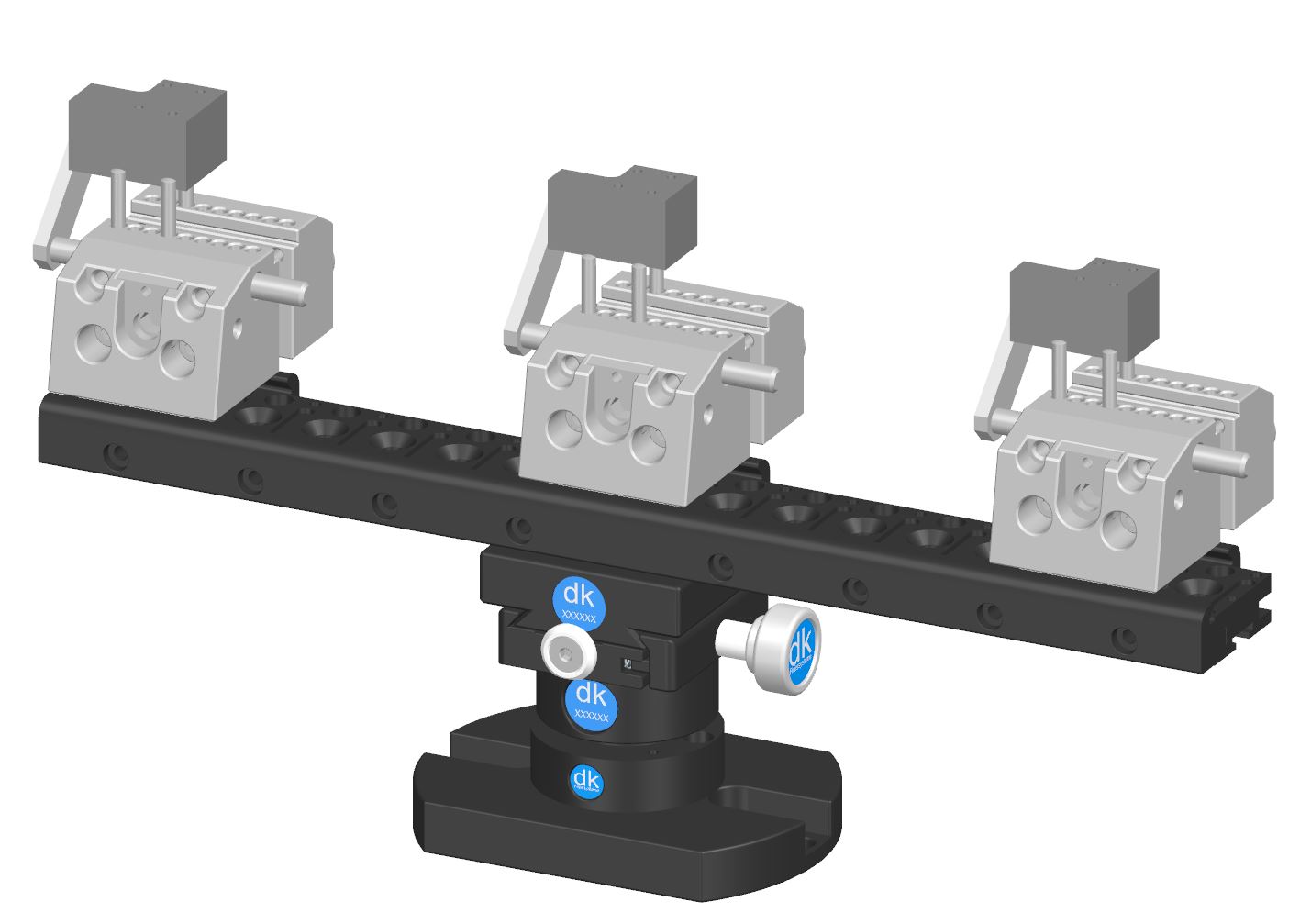
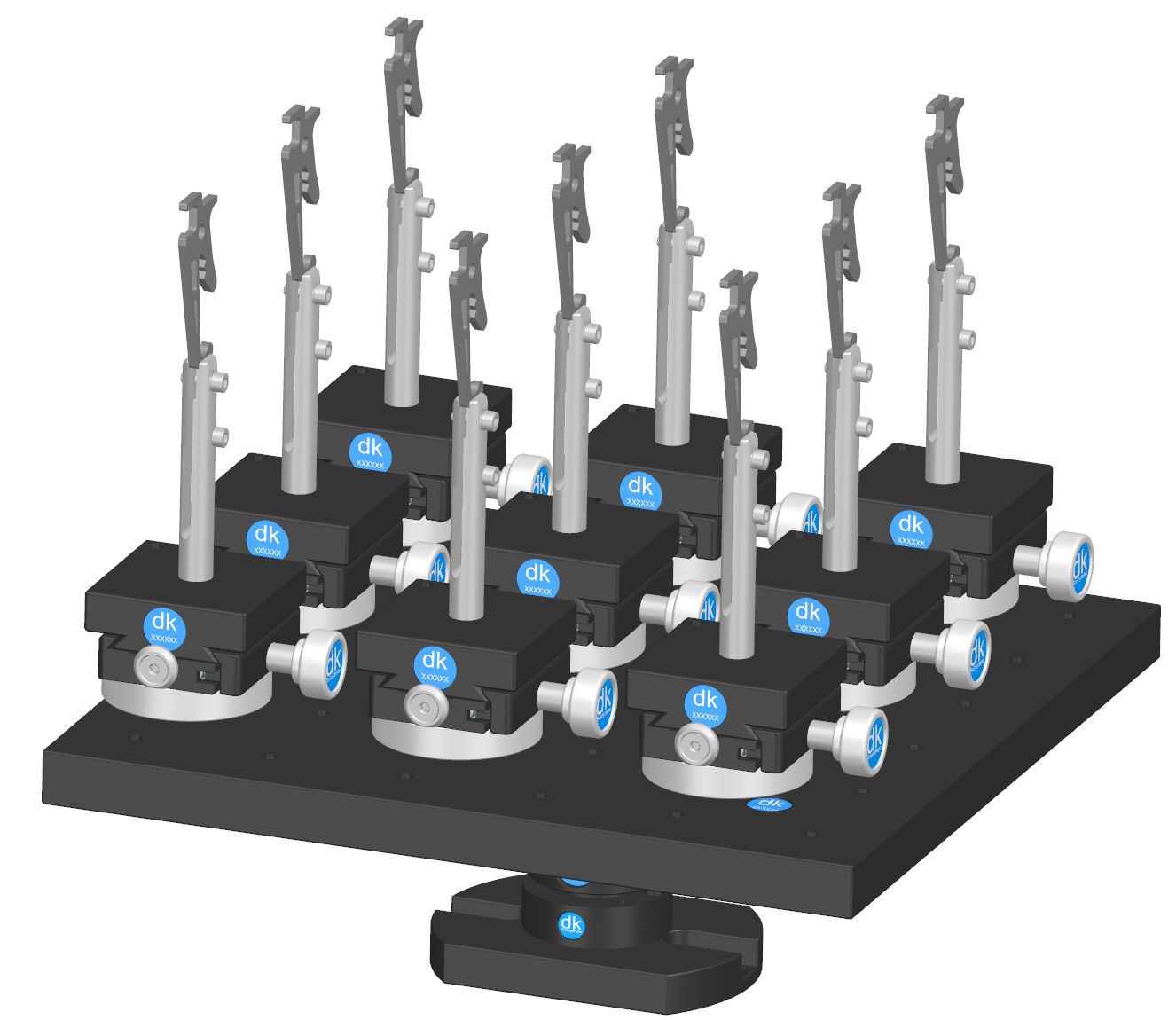
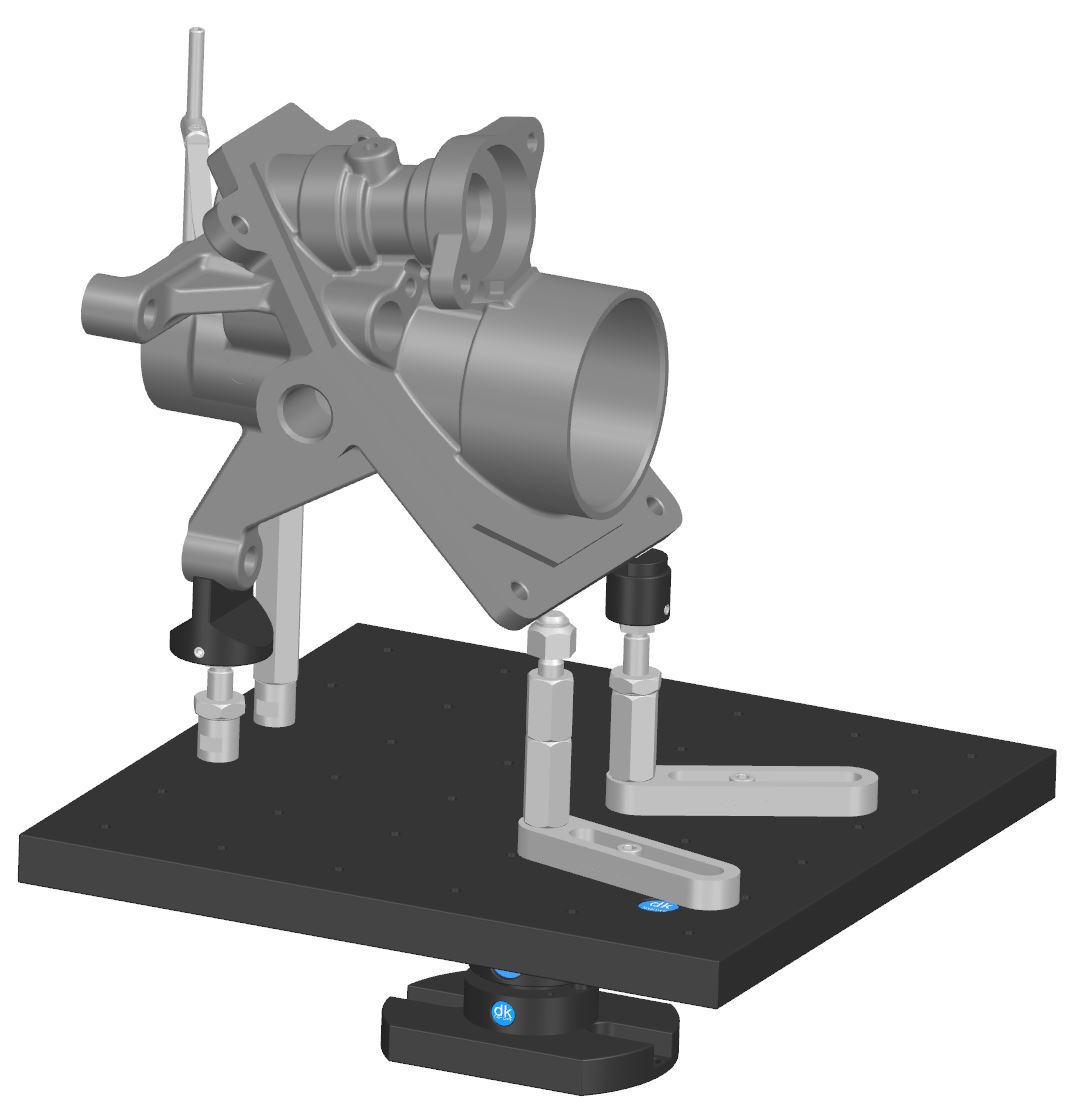
Exemples d’utilisation
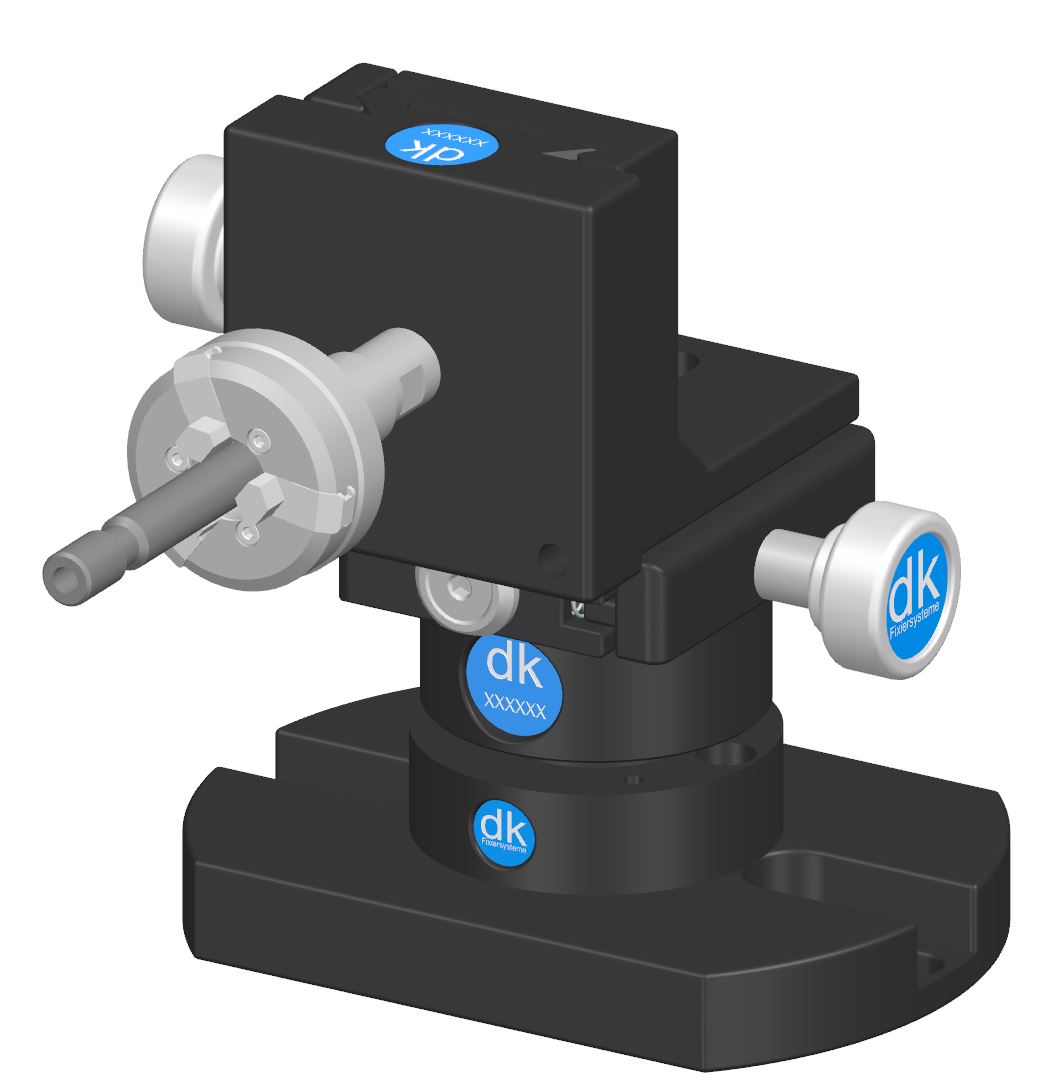
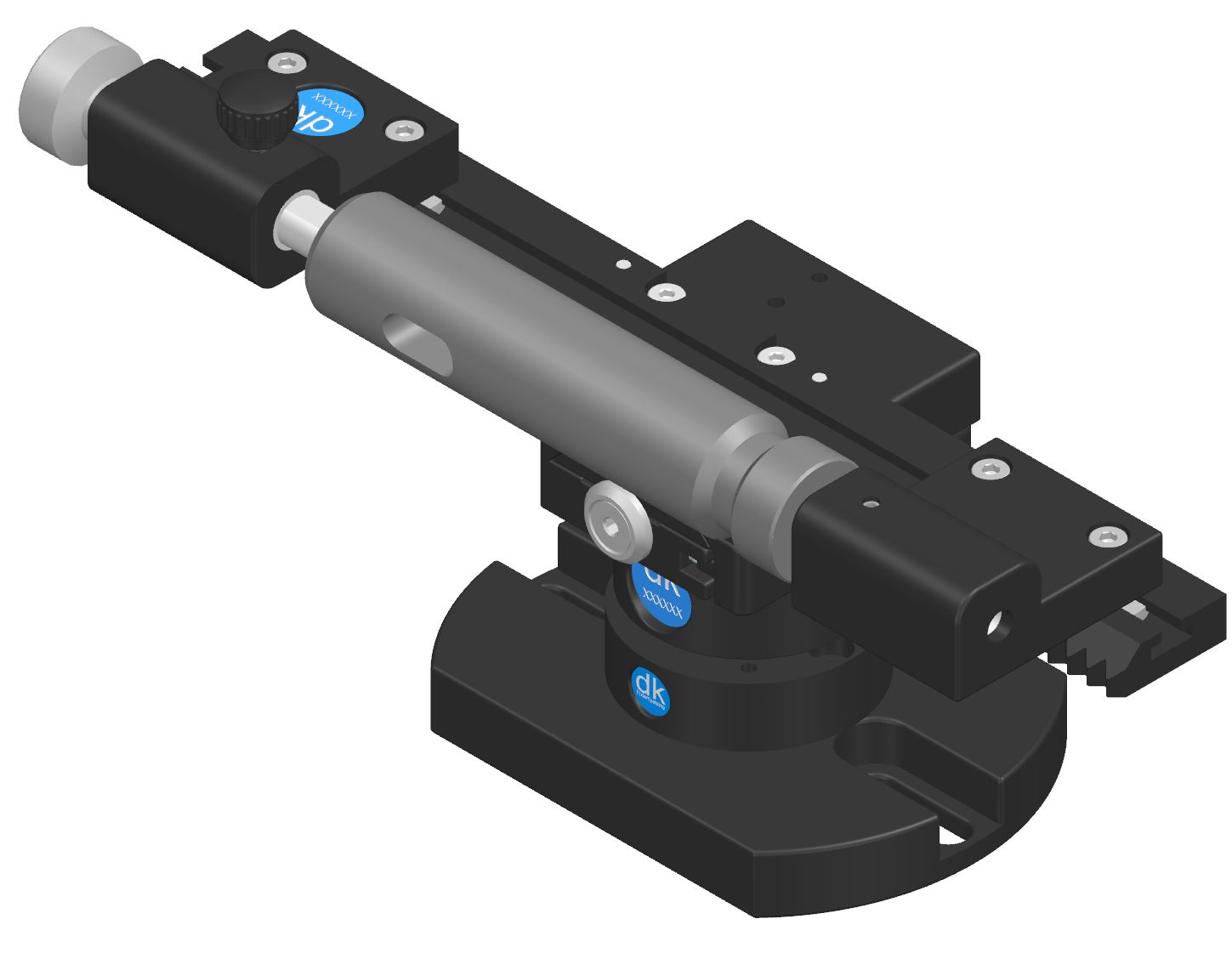
L’interface universelle entre la machine et la pièce à usiner grâce à de nombreux supports de base adaptés à toutes les technologies de mesure. Entièrement compatible avec les systèmes modulaires dk, ce qui offre d’innombrables possibilités de dispositifs de fixation.
Dissociation de l’opérateur de la machine de mesure
» Le fonctionnement sans personnel spécialisé en métrologie pour effectuer des mesures proches de la
fabrication permet de gagner du temps
» L’opérateur équipe la machine dans la zone de préparation lorsque cela est compatible avec ses processus
» Des processus de mesure sans opérateur et sans frais de personnel
» Des processus sans opérateur au sein d’équipes supplémentaires ou en dehors des heures de travail régulières
» Une qualité constante des processus, car les opérations programmées se déroulent toujours de manière identique
L’interface universelle SWA40
» Pour toutes les technologies de mesure
» Pour toutes les machines de mesure, quel que soit leur fabricant
» Pour tous les robots industriels, quel que soit leur fabricant
» Pour tous les porte-pièces des nombreux systèmes modulaires dk
» Pour tous les types et toutes les formes d’échantillons
» Pour le serrage simple ou multiple
» Pour une programmation simple, car le préhenseur et le robot ne s’orientent pas vers l’échantillon mais vers l’interface

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}